Hello! I'm Vansh Thakur
I am a graduate student in Electrical and Computer Engineering at the University of Michigan, Ann Arbor, working on safe and robust planning and behaviours for autonomous systems.
Currently a Graduate Researcher at ROAHM Lab, I build trajectory optimization solvers for constrained motion planning in high-DoF robotic systems. I also hold a B.Tech. in Electrical Engineering from NIT Hamirpur.
Research
Rapid Trajectory Optimization for High DoF Systems
ROAHM Lab, University of Michigan — May 2025–Present
Developed a real-time trajectory optimization system for constrained robotic motion in C++, achieving reliable online planning with strict constraint satisfaction. Deployed on a 7-DoF manipulator with 100% success rate and extended to quadrupeds, leading to an optimization-based whole-body controller for robust contact and stability.
Dual-Layer MPC for Autonomous Vehicles in CARLA
University of Michigan — Jan–Apr 2025
Developed a real-time MPC-based planning and control system for autonomous driving, replacing PID control to eliminate instability under urban conditions. Achieved reliable, bounded solve times and validated stable closed-loop behavior in CARLA.
Quadcopter Dynamics, LQR, MRAC & Deep MPC
NIT Hamirpur — Aug 2023–Apr 2024
Developed a robust quadrotor control framework by integrating Model Predictive Control (MPC) with machine learning techniques to handle uncertain dynamics. Analyzed performance trade-offs between traditional and learning-based control approaches, highlighting improvements in adaptability and tracking under uncertainty.
Course Projects
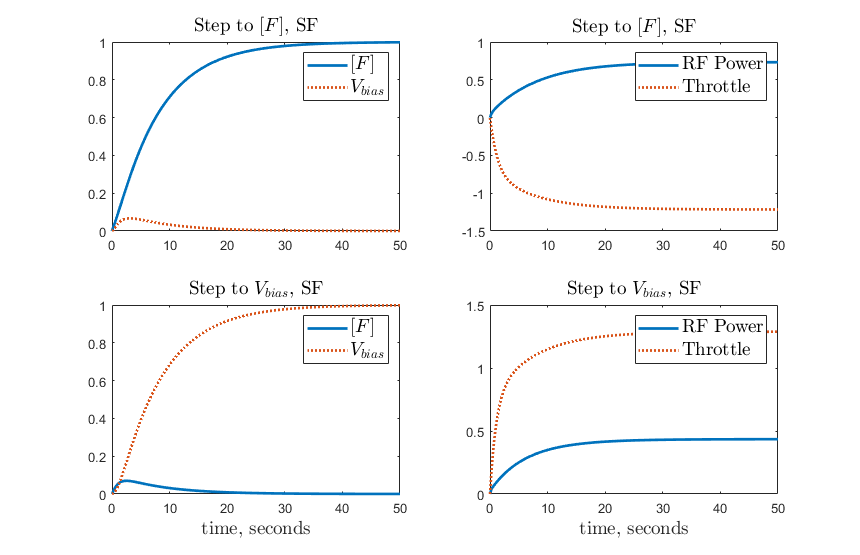
Multivariable Control for Reactive Ion Etching
EECS 565 — Winter 2025
Designed optimal multivariable feedback controller to outperform industry-standard SISO loops for UM's 3x3 RIE plasma chamber. Used LQR + state integrator + Kalman Filter. Reduced voltage spikes by 87% (0.6 → 0.078), halved RF power, and sped up convergence (47s → 11s). Analytically derived SISO limits and outperformed with a reduced 2x3 MIMO design.
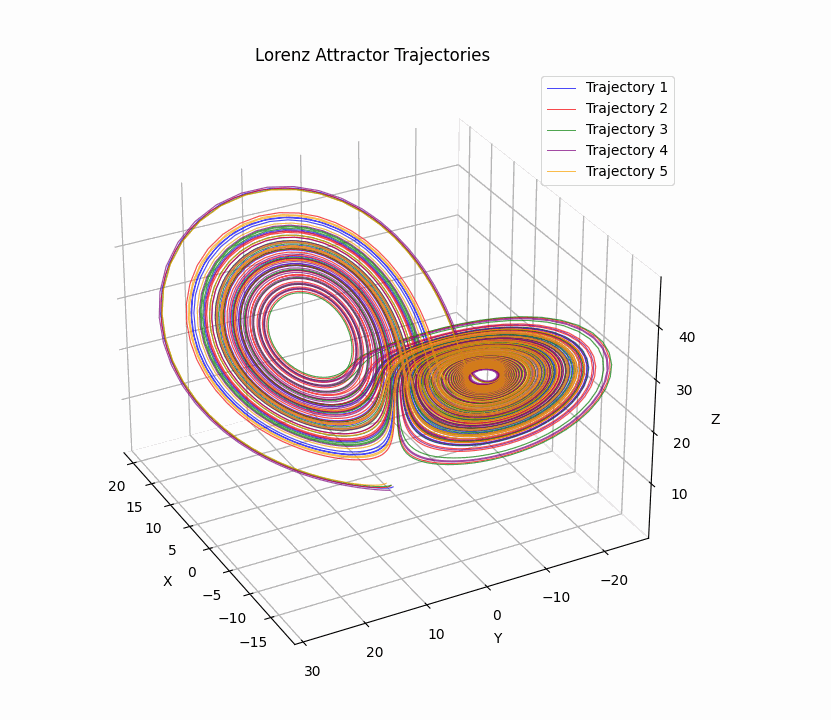
Deep Koopman Learning for Chaotic Systems
MECHENG599 Data-Driven Controls — Winter 2025
Learned dynamics of the chaotic Lorenz system using neural approximations of the Koopman operator. Trained deep autoencoder in PyTorch to project 3D → 15D latent space; learned linear Koopman dynamics in latent space. Achieved testing MSE ≈ 0.4 across 60k samples of chaotic evolution.
ROB 550: Autonomy Stack for MBot
Fall 2024
Built full autonomy stack for a differential-drive mobile robot using ROS2, SLAM, localization, and motion planning. Implemented occupancy grid mapping from RPLidar data in C++, Monte Carlo Localization with particle filters, and A* path planning for autonomous maze navigation.
EECS 461: Embedded ADAS System on NXP S32K144
Fall 2024
Designed a complete ADAS stack with cruise control and lane keeping using model-based design and embedded C. Built Simulink+C implementation on a physical testbed with haptic steering wheel. Worked with CAN, ISRs, ADCs, and motor encoders.